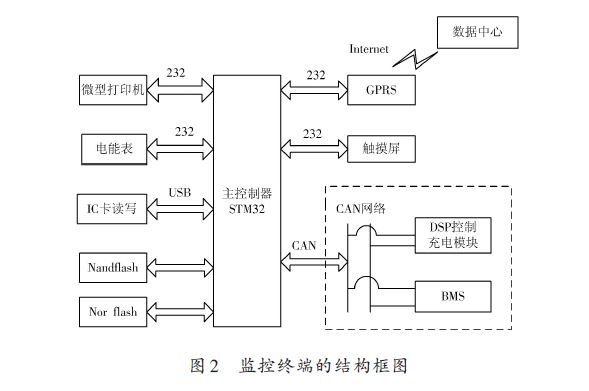
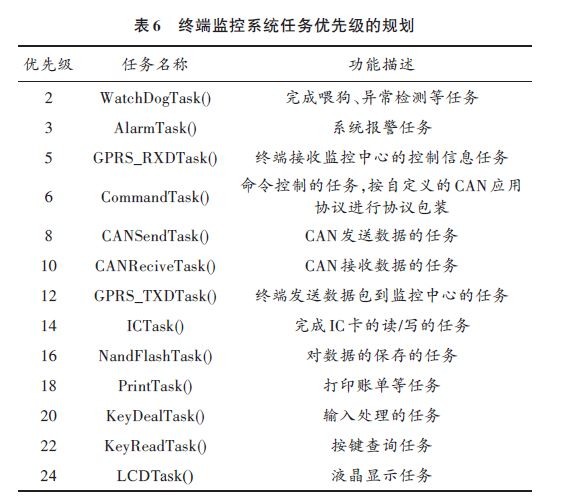
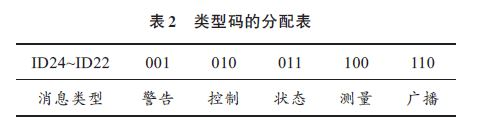
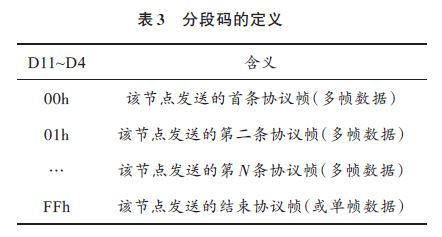
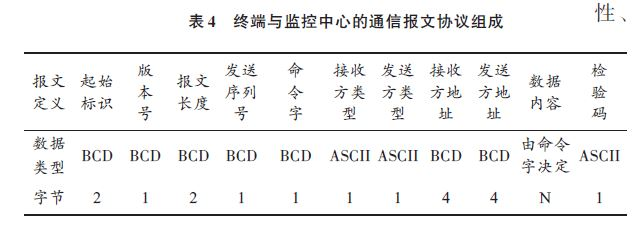
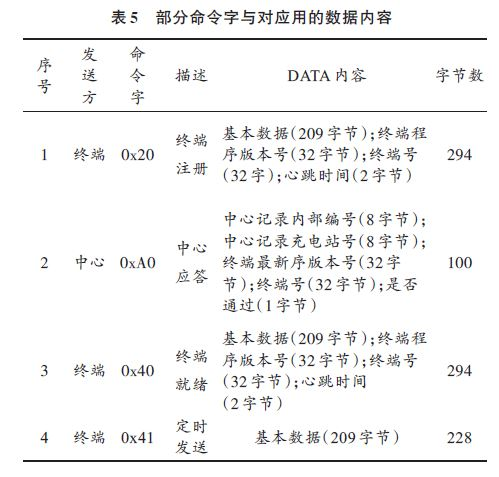
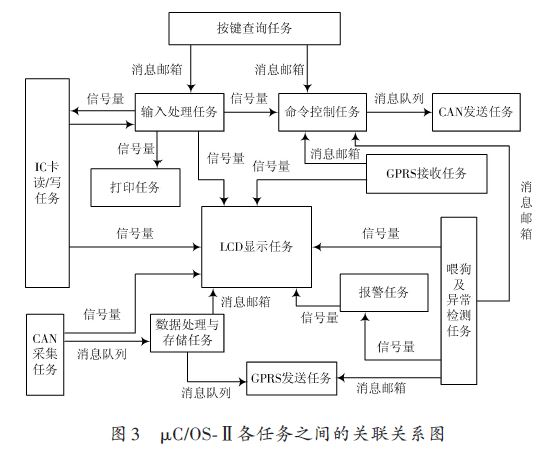
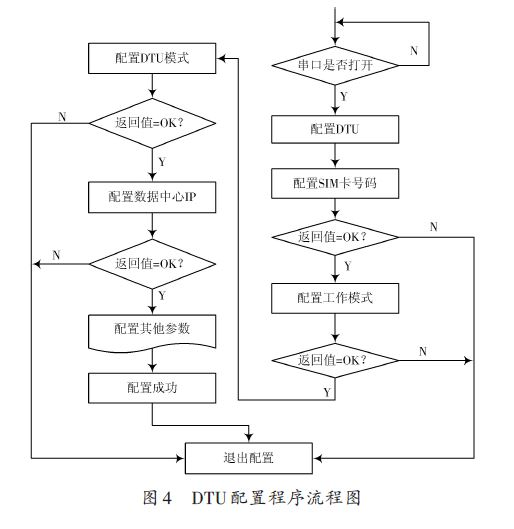
Abstract: With the advent of the Internet of Things era, the intelligent remote management of fast chargers is realized, and the design of its monitoring terminals is one of the key technologies. Combined with single-chip microcomputer STM32 and real-time operating system μC/OS-II, the overall design scheme of fast charger monitoring terminal is introduced. The protocol formulation and software design method of high-power charger CAN bus and GPRS data transmission are studied, and the GPRS traffic cost is An economic analysis was conducted. The results show that the monitoring terminal ensures the stability of the monitoring network and realizes the monitoring of the running status of the charger and its remote management. 0 Preface With the country's strong support for new energy technologies, electric vehicles have gradually become the target of the country's vigorous development in the new energy vehicle industry, and electric vehicle charging stations and fast chargers are indispensable service infrastructure after large-scale electric vehicles. one. A large number of off-board intelligent fast chargers for electric vehicles distributed in various residential quarters and parking lots will become mainstream in order to achieve efficient, safe and intelligent management. In view of the unattended operation of the current fast charging group, this requires that the fast charger must have higher reliability and automation, more complete functions, and remote maintenance. In this way, distributed, modular and intelligent become the development direction of fast chargers, and high-performance, low-cost charger monitoring terminals are the key technologies. In order to optimize the resource utilization and management of multiple chargers in the management area, it is inevitable that the monitoring terminal interacts with the Internet. 1 Overall plan for monitoring the network As shown in the monitoring network structure diagram of the charger of Fig. 1, the monitoring terminal serves as an important gateway between the charger and the monitoring center. Its effective communication links are: monitoring center - monitoring terminal; monitoring terminal - charger (or battery management system (BMS), electric car, etc.). Through the monitoring terminal as a medium, the establishment of a communication link between the monitoring center and the charger and the electric vehicle is realized. The terminal communicates with the charger, the BMS and the electric vehicle through the CAN network, collects the data information of the relevant node and stores it, and feeds the relevant information to the charger. The charger realizes intelligent charging of the electric vehicle battery based on the relevant information. The terminal communicates with the monitoring center through GPRS connection. The terminal transmits the relevant data of the charger, battery and electric vehicle back to the monitoring center. The monitoring center realizes the remote control and real-time monitoring function of the charger, and records the operation and failure of the charger. Happening. The owner can check the current idle charger location by the monitoring center to make full use of resources. 2 monitoring terminal function module 2.1 Overall design of the monitoring terminal The monitoring terminal is a bridge connecting the monitoring center and the charger. The overall design structure is shown in Figure 2. The monitoring terminal is mainly composed of the core module of STM32ZGT6 of Cortex-M3 core, data acquisition module (CAN network), user charging interactive information module, data storage module, real-time clock module and GPRS communication module. It consists of 6 parts. The terminal uses the STM32ZGT6 microprocessor chip of the Co-tex-M3 core. The MCU has a wealth of on-chip hardware resources, including a CAN 2.0B controller, and up to four serial ports to meet the needs of the terminal CAN and GPRS network interfaces. The working process of the monitoring terminal is as follows: the user billing module reads the user information and selects the charging mode, and sends a corresponding charging command to the charging module through the CAN network; at the same time, the monitoring terminal reads the key data frame in the CAN network, such as the running status of the charger, etc. And save the data in NandFlash. The current charging user information and operating parameters such as the charger are periodically sent to the monitoring center via GPRS. The monitoring terminal can print the user's balance or charging credentials according to the needs of the user. 2.2 CAN bus module In order to better ensure the reliable transmission of the CAN bus, the system defines a common application layer CAN bus protocol. The message ID of the CAN 2.0B protocol is mainly allocated and defined. As shown in Table 1. (1) Priority determination. The CAN protocol specifies that the smaller the message ID, the higher the priority of the message. When competing for the bus, the packets with the highest priority are sent preferentially, and the packets with the lower priority are competing for the bus. The CAN bus competition algorithm is very efficient and is a non-destructive competition [3]. Because the CAN protocol specifies the identifier from high to low, the first 7 bits cannot be all dominant. Therefore, the priority 1111b is reserved, so the system has 15 priority levels. (2) Type code. The protocol will specify the type of message from ID24~ID22. In this system, the types of messages used are: control, status, measurement, warning and broadcast. The specific allocation according to the type code is shown in Table 2. (3) Source address. The protocol stipulates that ID12~ID16 are source addresses, and ID17~ID21 are destination addresses, which in turn identify each receiving node and sending node of the message. The 5-bit address bit retains 11111b as the broadcast address, and 31 control nodes can be identified to meet the monitoring requirements of the electric vehicle charger. In this system, 00000b is defined as a monitoring terminal, 00001b is a charger node, and 00010b is a battery management system (BMS) node. (4) Segment code. Due to the different amount of data sent by different nodes, a data frame may not be able to send the data collected from the bottom layer once (that is, more than 8 bytes). In the protocol, ID11~ID4 are defined as segmentation codes, as shown in Table 3. In Table 3, the data frame of a node starts with the segment code 00H and ends with FFH, and can support up to 256 × 8 bytes of data. If the node has only one frame of data, the definition FFH is also a single frame of data. For example, the BMS node includes information on the total battery pack voltage, the total battery pack current, the battery pack SoC, the temperature of each battery pack (nine), and the battery pack status. Each data occupies 2 B. Obviously, a data frame cannot send all the information of the node, so it must be sent in multiple frames. 2.3 data transmission module The terminal is connected to the Internet through a serial port external Zhou Ligong GPRS module (ZWG-23A). After surfing the Internet through the GPRS network, after connecting to the server, the data is sent to the server periodically according to the communication protocol. According to the "Shenzhen Electric Vehicle Charging System Technical Specifications" standard document, the agreement consists of the message start identifier, version number, command word, message length, data content, check code, etc., the specific format is shown in Table 4. . (1) Initial identification. Set to 0xFAF5 to wake up the receiver to receive data. (2) The length of the message. Is the total length from [send serial number] to [data content]. (3) Check code. It is a carry-free accumulation sum from [starting mark] to [data content]. (4) Receive (send) party type and address. The value of the monitoring center is "Business Service Platform", its value is 1, its address is a unique address under this type code; the type of the terminal is "scheduling terminal", its value is 255, and the address is under this type. A unique address. (5) Data content and command words: Different command words determine the composition of the content of the data carried by the message and the number of bytes occupied. Data content is typically a combination of one or more data objects, or it can be empty. In the case that the sender responds abnormally or not, each data message is sent at most six times, each time interval is 30 s. The data content is different according to the command word, and the data object is different. The communication between the terminal and the monitoring center includes four stages: terminal registration, center response, terminal ready, and timing transmission. Some command words and corresponding data contents are shown in Table 5. 3 software design Multi-task management of 3.1 μC/OS-II The μC/OS-II real-time operating system is a system platform for monitoring terminals. The system is a real-time operating system of the deprivatable multi-tasking kernel, which has the advantages of real-time, tailoring, reliability and stability. μC/OS-II is rich in system resources. In addition to its own system tasks, users can establish up to 56 tasks and provide system-level services such as semaphores, message mailboxes, message queues and memory management, which are sufficient for monitoring the charging pile. System requirements for the terminal. In order to realize the functional requirements of the monitoring terminal, the following 13 tasks are designed in μC/OS-II: display task, keyboard query task, input processing task, print task, data storage task, IC card read/write task, GPRS The transmission task, the CAN data reception task, the CAN data transmission task, the GPRS reception task, the command control task, the alarm task, and the watchdog dog feeding and abnormality detection tasks. The multi-tasking feature of μC/OS-II stipulates that each task must have a different priority. According to the relevance, criticality, urgency, frequentness and real-time requirement of the task, the priority of the task is determined. It is necessary to ensure the relative independence of each task, and avoid the task scheduling frequently causing the efficiency of the system to decrease. The priority planning of the task is shown in Table 6. The basic data in Table 1 includes the city area code, the parking lot serial number, the charging pile position information, the message sending time, and the related information of the charger, BMS and user IC card. A certain interval is reserved between the priorities of each task in the table to facilitate future improvements and upgrades of the system. The system sets the clock beat to 10 ms to meet the real-time requirements of the charging pile. The μC/OS-II system uses 13 communication methods of semaphore, message mailbox and message queue to associate 13 application tasks in the system. The relationship is shown in Figure 3. 3.2 Configuration of ZWG-23A Module The ZWG-23A is linked to the terminal via a serial port, which links to the Internet via a GPRS network for mobile communications. Since Zhou Ligong does not provide a DTU configuration program based on μC/OS-II, the system needs to develop its own configuration program. The program flow chart for configuring DTU is shown in Figure 4. Assume that the terminal registers with the center every day, and sends monitoring information to the center every 30 s heartbeat time. According to the data content byte of Table 6, the GPRS traffic generated by one terminal sending a message one day is about (228 × 2 × 60 × 24 + 294 × 2 + 100) (128 × 1 024) = 5 MB, calculated as 30 days per month, the GPRS traffic generated by one terminal per year is 1.7 GB. The annual traffic of 2 GB is used. The package is sufficient to meet the traffic charges generated by the terminal for one year. 4 Conclusion In this paper, the structure of the electric vehicle rapid charger monitoring network is studied, and the communication application layer protocol of CAN and GPRS of the communication network of the monitoring terminal is analyzed in detail. Its CAN network protocol has a wide range of versatility, and GPRS has low traffic and can be extended to applications in other fields of automation. 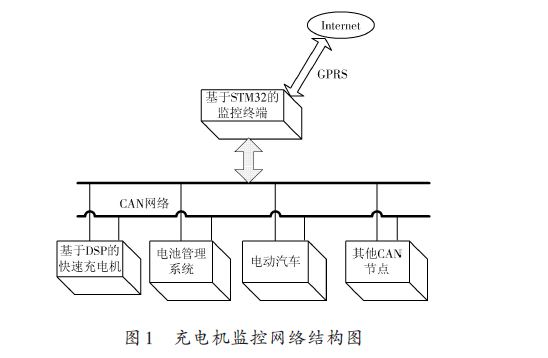
Design of monitoring terminal for electric vehicle fast charger
0 times
Window._bd_share_config = { "common": { "bdSnsKey": {}, "bdText": "", "bdMini": "2", "bdMiniList": false, "bdPic": "", "bdStyle": " 0", "bdSize": "24" }, "share": {}, "image": { "viewList": ["qzone", "tsina", "tqq", "renren", "weixin"], "viewText": "Share to:", "viewSize": "16" }, "selectShare": { "bdContainerClass": null, "bdSelectMiniList": ["qzone", "tsina", "tqq", "renren" , "weixin"] } }; with (document) 0[(getElementsByTagName('head')[0] || body).appendChild(createElement('script')).src = 'http://bdimg.share. Baidu.com/static/api/js/share.js?v=89860593.js?cdnversion=' + ~(-new Date() / 36e5)];